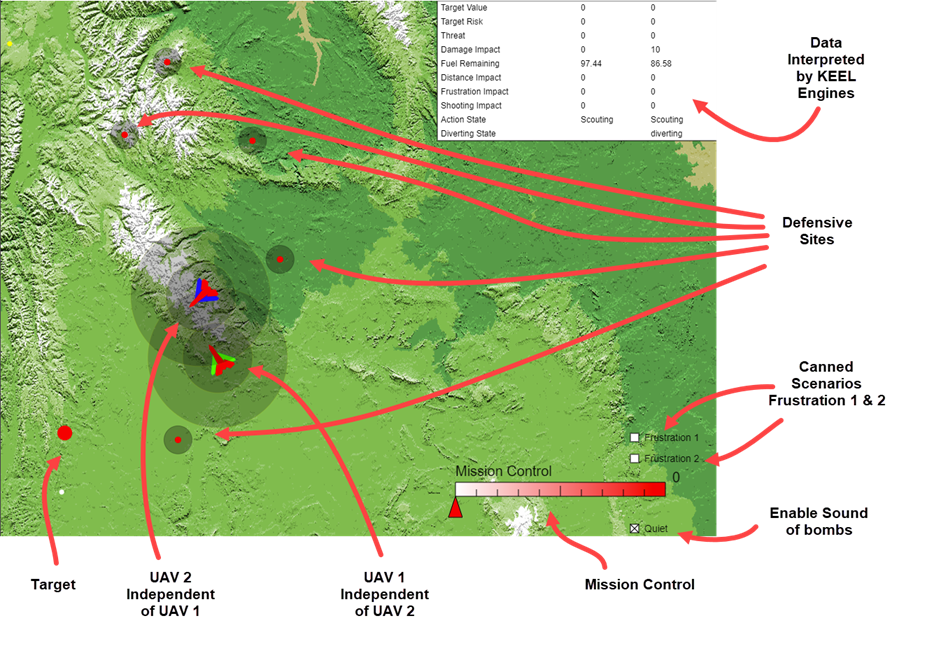
This demonstration shows two (2) Unmanned Aerial Vehicles (UAVs) that have integrated KEEL Cognitive Engines. The UAVs are operating autonomously. They have their own ability to recognize the target (shown as a larger red dot on the map). The UAVs will determine the value of the target and an associated risk. The UAVs will each be monitoring their weapon supply and their fuel supply. They will be detecting threats as they occur. All of this information is integrated in the respective KEEL Engine where the situation is constantly being analyzed. The KEEL Engine for each of the UAVs is also participating in collision detection.
This demonstration also incorporates Mission Control as part of the KEEL Cognitive Engine. In this demo, Mission Control authorizes the attack, if one of the UAVs detects a target that it feels is appropriate. This allows for human-in-the-loop participation in the mission. In this demonstration, Mission Control can be considered "semi-autonomous", in that it can operate completely without human intervention, OR it can accept human input. The scroll bar in the lower right corner of the map allows a human to participate in the overall execution of demonstration. In this case moving the scroll bar to the right causes a message to be sent to the UAVs that the target is to be considered more valuable that what is detected by the UAV itself. The UAVs are also told to be more risk tolerant. The magnitude of these directives is defined as curves in the KEEL Engine.
One of the key points that we are trying to show is that it is more effective to control how the UAVs thinks, rather than completely taking over and operating them with remote control.
Mission Control authorizes the attack and (with user interaction) can change how the UAVs interpret the target. UAV operation, however, is completely under control of the UAVs themselves. Once a "significant" target is detected, the UAV will determine the optimal instant to shoot. It balances the target risk against distance, knowing that the closer it gets, the better chance it has to destroy the target. It also "knows" (this is the reasoning built into the KEEL Engine) that the closer it gets to the target, the higher risk it takes. (In this demonstration, the Target does not actually resist, but the UAVs reasoning model assumes that it might.)
In this demonstration, the UAVs also include the concept of frustration in their goal seeking approach. Two canned scenarios are provided. (This means that the target value is canned and the location of the defensive mechanisms is pre-calculated as is the initial heading of the UAV and its initial position is set.) Otherwise the UAVs / Mission Control are operated just like any other operation. By including frustration in the UAV model, the UAV can attempt to find safe ways to attack the target multiple times. In this demonstration, the UAVs will just give up after a number of attempts. In a real application, different maneuvers might be attempted. To review the concept of frustration in more detail, see the specific demonstration on Frustration.
In this demonstration, Mission Control has relatively simple responsibilities. However, as with any KEEL cognitive models, there is no limit to the number of inputs and the number of control variables that can be managed.
A rendering of the KEEL source code for one of the UAVs is also available on Compsim's website. While this dynamic graphical language may appear complex, it is actually very simple. With a short training class, one learns how information items are valued and fused to address complex non-linear, inter-related problem sets.
Anyone interested in the specifics of this demonstration should contact Compsim directly.