This demonstration has recently been updated. The Auto Distance policy was added such that the impact of the distance of the Truck to the Base Station Antenna is used to control the impact (importance) of Observation Point to Base Station Antenna when determining which observation point is to be selected.
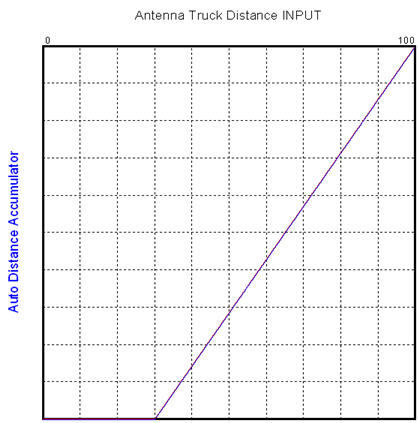
The key point that we are trying to focus on here is that it took less than 5 minutes to extend the decision making policy and another 15 minutes to update the final application. The unchecked Auto Distance checkbox on the form allows the manual adjustment of the "importance" of Antenna Distance (to Observation Point) when determining how each point should be evaluated. In the manual case it didn't matter how far the Truck was from the Base Station Antenna. The importance of the antenna to point distance was always the same (as set manually). The addition of the automatic case (Auto Distance checked) uses the Antenna to Truck distance to automatically control the "importance" of the Antenna to Point evaluation. The calculation was added so if the truck was relatively close to the base station antenna, then the Antenna to Point distance would carry NO impact on the Antenna to Point evaluation. This can be seen in the chart above. A maximum communication range (R) was used. When the truck was within a radius of 30% of R, then the Antenna to Point distance would not be included in the point selection process. (It is assumed that communication would be fine from any point.) As the Antenna to Truck distance increased from 30% of R to 100% of R, the importance of the Antenna to Point distance would increase to 100%. Thus when a point is outside of the maximum communication distance, it would have maximum impact (the closer the point is to the antenna, the better it is). If all points are outside of R, they would all be treated the same (same as if the Antenna to Truck distance is < 30% of R). The decision would only be based on safety and closeness of next point.
NOTE: The present design has the UAV continuing to track the truck, even when it goes out of antenna range. If it is in a safe (non-hazardous) area, the UAV will always move to the next closest point to observe the truck. A production application may trigger alternative decisions and actions (go home, request help, change communication channels....).
To develop and test this extension to the model, we added KEEL logic to switch between manual and automatic operation (1 minute) and the linear range adjustment logic (1 minute). The logic was tested in the KEEL Toolkit with the dynamic graphical language, which allows us to simulate the Truck to Antenna distance and the manual / automatic switch (2 minutes). The design was translated to Flash for the demonstration and integrated into the Flash based application (5 minutes). The Flash Application was modified to include the new checkbox and it was integrated with the Actionscript code (10 minutes). The design was tested to see if it worked as expected. It was published to the website.
An additional 10 minutes was used to test the application using the "animation" techniques built into the KEEL Toolkit. The Flash code that was created includes an optional function to log the inputs observed by the UAV (in this case the sliders controlling the criteria importance for safety, antenna distance, and closeness to present location, and the Antenna to Optional Point distance, the UAV to Optional Point distance, and the Optional Point Risk information). Every time the UAV evaluates the points, this information is written to an XML file that is read back into the KEEL Toolkit (development environment) where the "real-world" input data drives (and animates) the language. This way one can see explicitly how each point is interpreted.