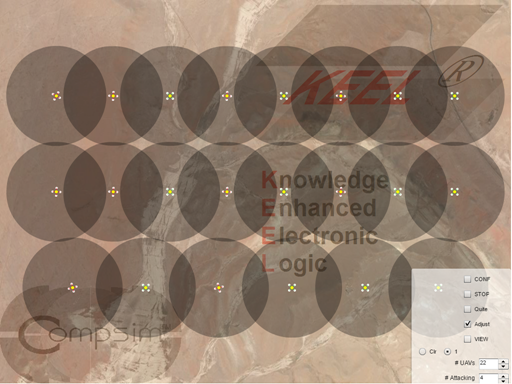
This is an extension of the Swarm Management demonstration. In the Swarm Management demonstration, the swarm self-organized by selecting a leader and a squad based on their own self-evaluation before engaging a target identified by clicking on the land surface. In the lower right corner of the demonstration, configuration options are provided (see below): number of quadcopters, number that will assigned to the next target, policy configuration and display options.
The video below provides a brief explanation of what is going on behind the scenes.
This demonstration extends the options by allowing a controlling entity (you) to select formations to which the UAVs fall into their assigned positions. Of course, in production, there could be external intelligence that was available to the lead drone, that could dictate the formation to that drone's team. These named formations would be defined by SMEs assigned to defining tactics and strategies for battlefield engagements.
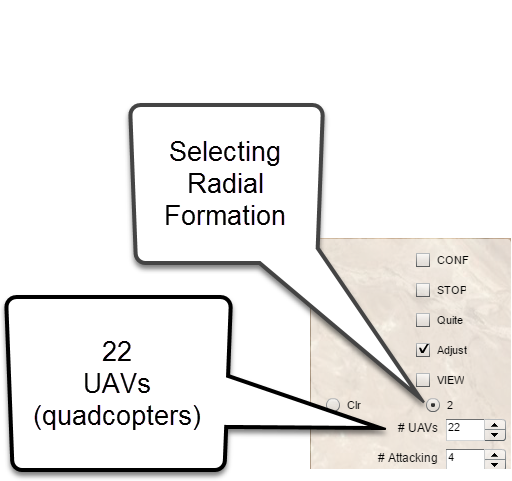
But to demonstrate this formation and fragmentation concept, a radio button selection allows the user to assign linear or radial formations.
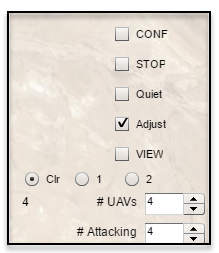
Up close:
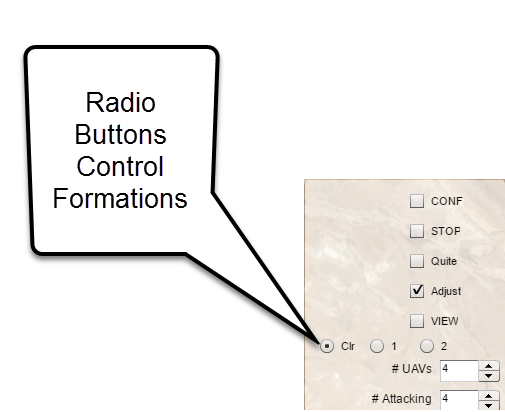
Radio buttons are for Clr (for no pattern), 1 for lines of UAVs and 2 for a radial pattern.
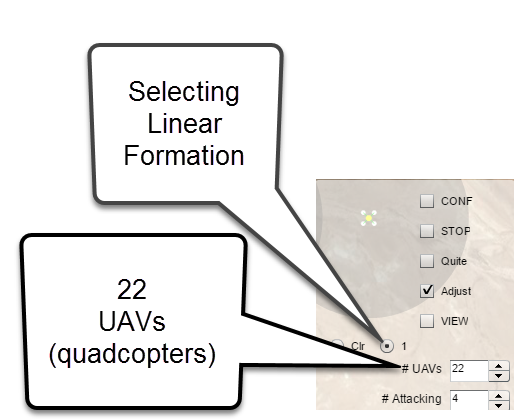
For radial.
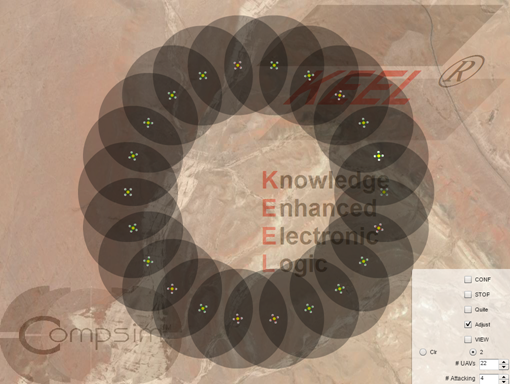
Click the radio buttons to switch from a structured formation to an unstructured one and from one formation to another.
Each UAV is an "object" (in software terms). Each UAV has a graphical component that represents a UAV. It also has behavioral characteristics that cause it to behave on the screen.
For each UAV, the behavior is driven by two (2) KEEL Engines. This means that a production UAV would have 2 small KEEL-based cognitive engines defining behavior if one was to match this demonstration. (One KEEL Engine is used for self-organization to determine which UAVs should be part of a squad that engages a target. The Other KEEL Engine (in each UAV) is used for collision avoidance. This keeps the UAVs (2 dimensional for this demonstration) from running into each other.
A CONF (Configuration) checkbox (top of control pane) is used to open a window at the left side of the screen to change this behavior.
The VIEW checkbox in the control pane above the radio buttons, opens the View pane that shows the driving factors used in the teaming decisions.
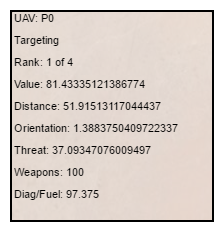
You can click on one of the UAVs and "see how it is interpreting its world.
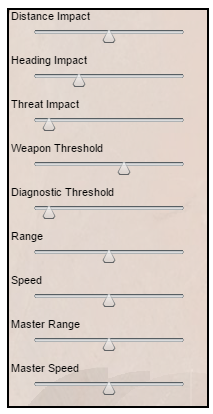
With the Config window you can influence the operational policies using configuration parameters that have been exposed in the KEEL-defined policy. We have selected a few parameters that one might want to expose to the field commander to demonstrate how one can create policies that can be field adjusted.
In the video, below the demonstration at the top of this page, we are showing how one can adjust the collision avoidance policy, that allows the UAVs to ignore the presence of other UAVs and they crash.
For a full explanation of the adaptive operational policies, contact Compsim.
|
Copyright , Compsim LLC, All rights reserved |